全國服務熱線:
180-9257-8363
180-9257-8363

水下機器人通常能夠分成兩個大類:一類是有纜水下機器人,習氣稱為遙控潛水器(RemoteOperatedVehicle,簡稱);另一種是無纜水下機器人,習氣稱為自治潛水器(AutonomousUnderwaterVehicle,簡稱AUV)。除此之外,按運用的目的分,有水下查詢機器人(觀測、測量、試驗材料的收集等)和水下作業機器人(水下焊接、擰管子、水下建筑、水下切割等作業);按活動場所分,有海底機器人和水中機器人。

水下機器人在20世紀50年代初誕生時,由于所涉及到的新技術還不行老練,電子設備的故障率高,通信的匹配以及起吊回收等問題沒有很好解決,因而進行比較慢,沒有遭受人們的重視。到了60年代,國際上開端兩大開發技術,即宇宙和海洋開發,促進遠距離控制型機器人取得了很快的進行,到了80年代,由于海洋開發與軍事上的需要,尤其是水下機器人本體所需的各種各樣材料及技術已取得了較好的解決,水下機器人才取得了非常大進行,開發出了一大批能作業在各種各樣不一樣深度,進行多種多樣作業的機器人,可用于石油挖掘、海底礦產查詢、救撈作業、管道敷設和查看、電纜敷設和查看、海上養殖、江河水庫的大壩查看及軍事等范疇。
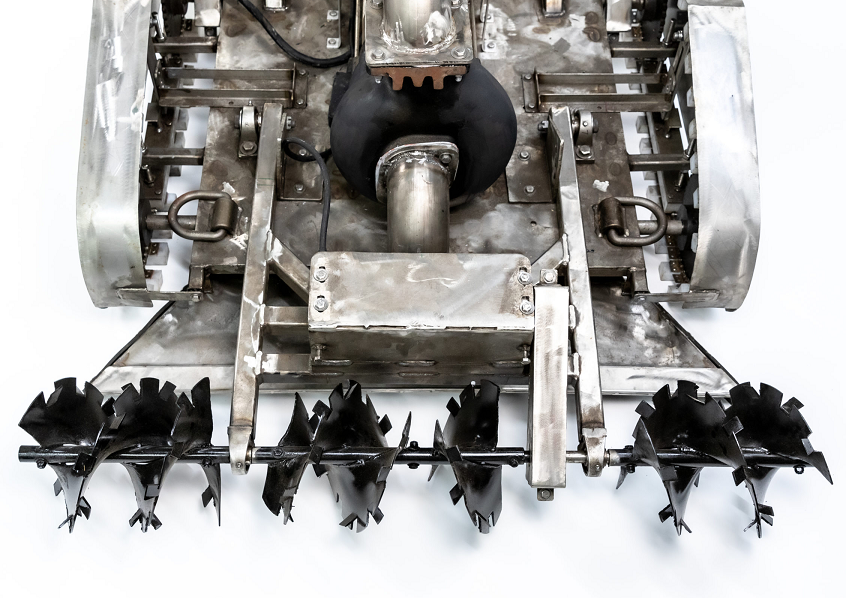
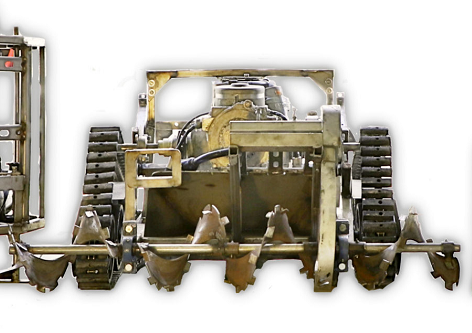
如今,水下機器人大部分是框架式和類似于潛艇的反轉細長體,跟著仿生科技技術的不斷進行,仿生魚形狀甚至于是運動方法的水下機器人將會不斷進行。水下機器人作業在充滿未知和挑戰的海洋環境中,風、浪、流、深水壓等各種各樣復雜的海洋環境對機器人的運動和操控干擾嚴重,促使水下機器人的通信和導航定位好不容易,這也是與陸地機器人較大的不一樣,也是如今阻止水下機器人進行的關鍵原因。